对直角坐标系位姿变换及描述的理解
本文最后更新于:2024年2月24日 下午
对直角坐标系位姿变换及描述的理解
任一刚性物体在空间中的静止状态需要由位置及姿态唯一确定,位置描述涉及平移变换,而姿态描述涉及旋转变换,如何在空间中准确描述一物体的位姿,需要了解物体的相对于某个确定坐标系的位姿信息,如若知道多个坐标系之间的相对位姿信息,即可获得该物体相对于中间任意坐标系的位姿描述,这也是坐标系转换的前提。
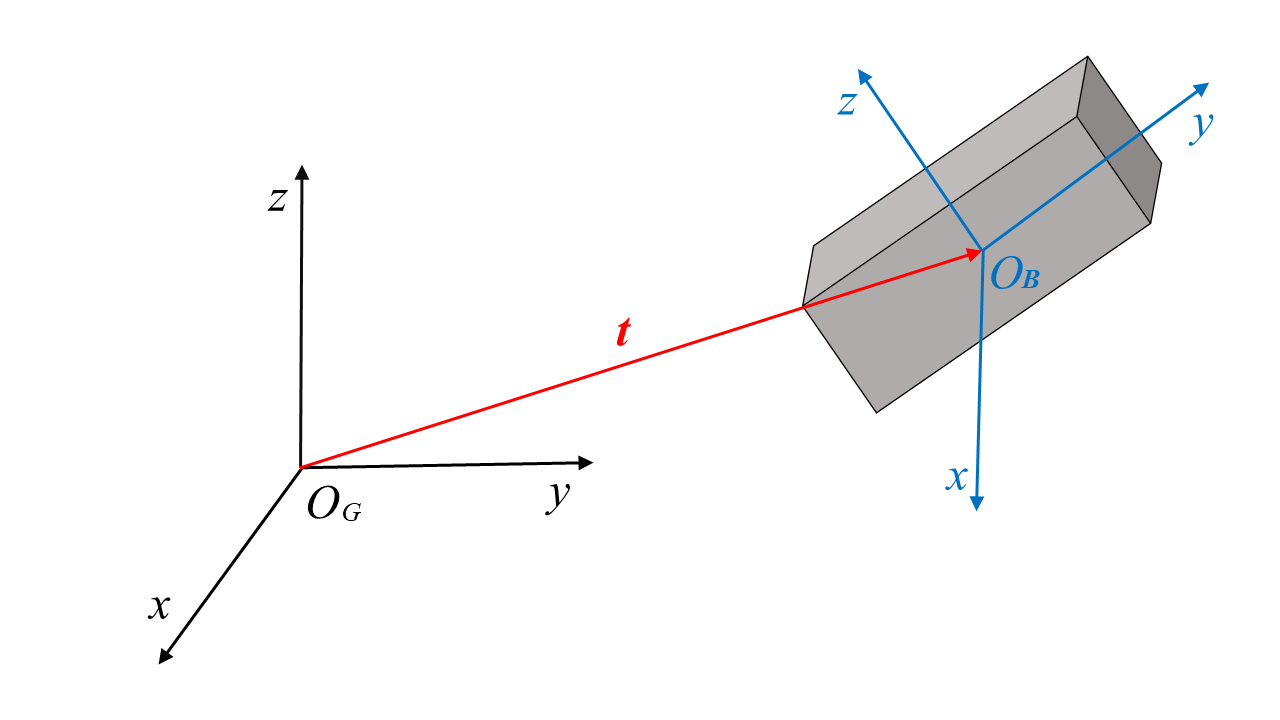
一、空间描述
(1)位置描述:平移变换
若仅描述两点之间的相对位置,用向量描述即可。首先需确定参考坐标系,才能确定 XYZ 各轴分量,其矩阵描述如下:
(2)姿态描述:旋转变换
要想描述刚性物体在空间中的状态,仅有位置信息时不够的,还需要有姿态信息,即确定与物体固连的坐标系相对与参考坐标系的位姿。通常我们给出旋转矩阵来描述这种相对姿态信息,而这仅仅用于表示两者之间得到相对姿态,并不体现变换过程。
两坐标系 {A} , {B}
之间的旋转矩阵
旋转矩阵具有一些性质例如:旋转矩阵是正交阵,即旋转矩阵的逆等于旋转矩阵的转置
(3)坐标系描述
若想完全表示两坐标系的相对状态,需要位置以及姿态信息,所以我们将两者组合用于准确描述两坐标系之间的相对位姿,例如 {B} 在 {A} 中的位姿表示。
1.混合变换
如下图,描述坐标系 {C} 在坐标系 {A} 下的位姿
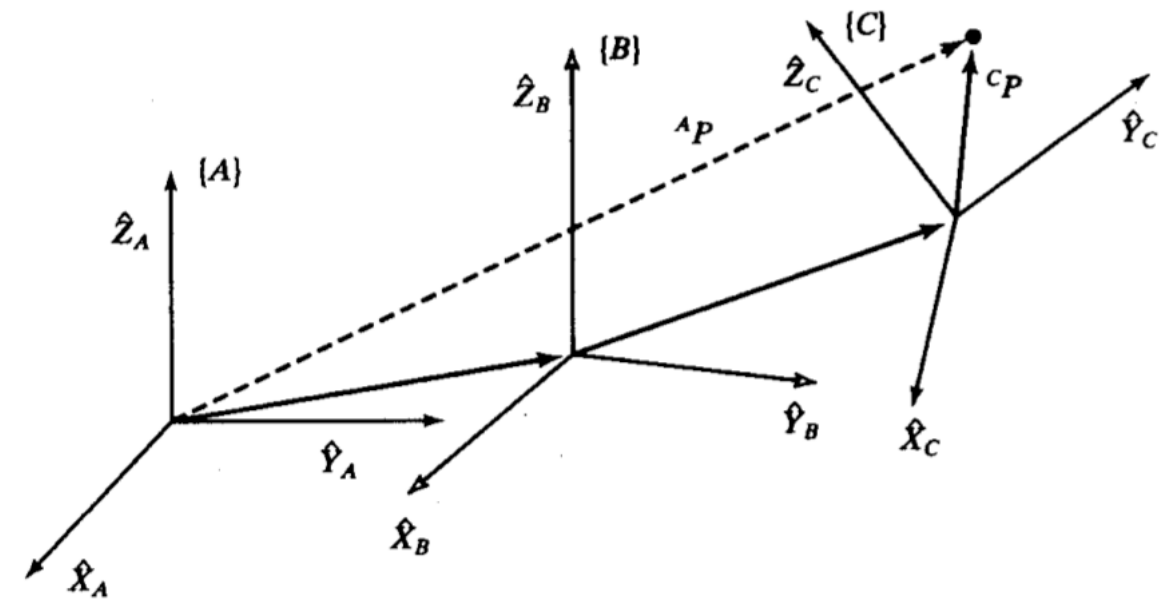
坐标系 {C} 中的 P 向量
位姿描述转换到坐标系 {A} 中的位姿描述:(
求得坐标系{C}中的向量转换到坐标系{A}中的表示,
2.逆变换
若已知 {B} 相对于 {A} 的变换
旋转矩阵:
平移矩阵:
变换矩阵:
(4)姿态的其他描述方法(欧拉角、四元数、旋转向量(或称为轴角))
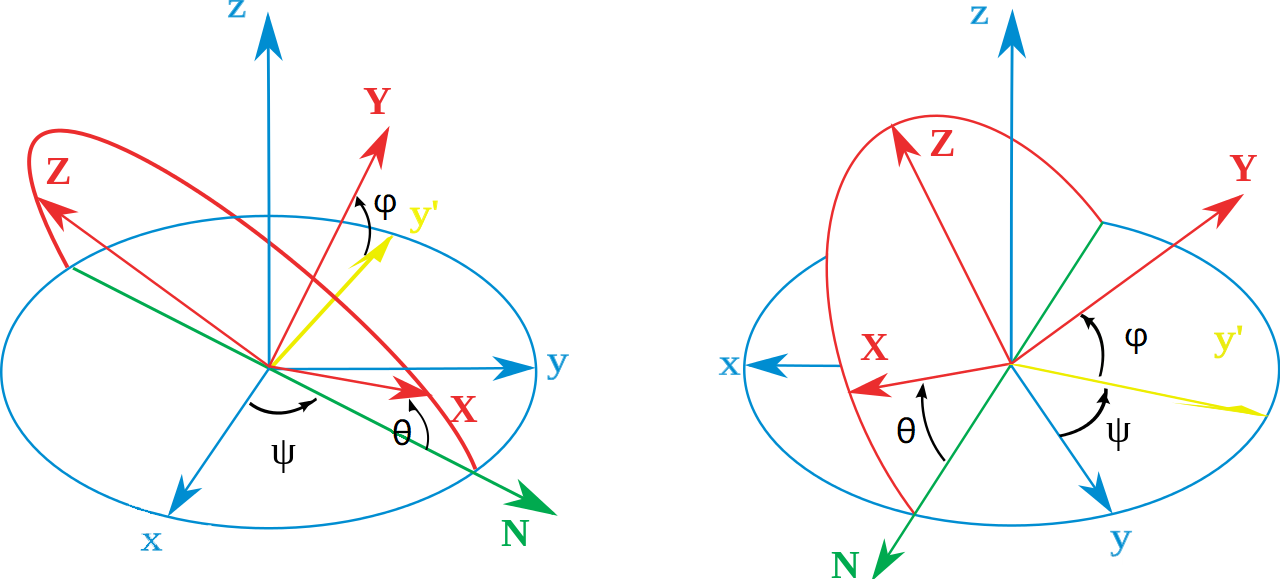
1.欧拉角
欧拉角的描述如下图所示,表示两个物体间的相对姿态(通过三个角度
a.欧拉角的旋转轴和旋转顺序
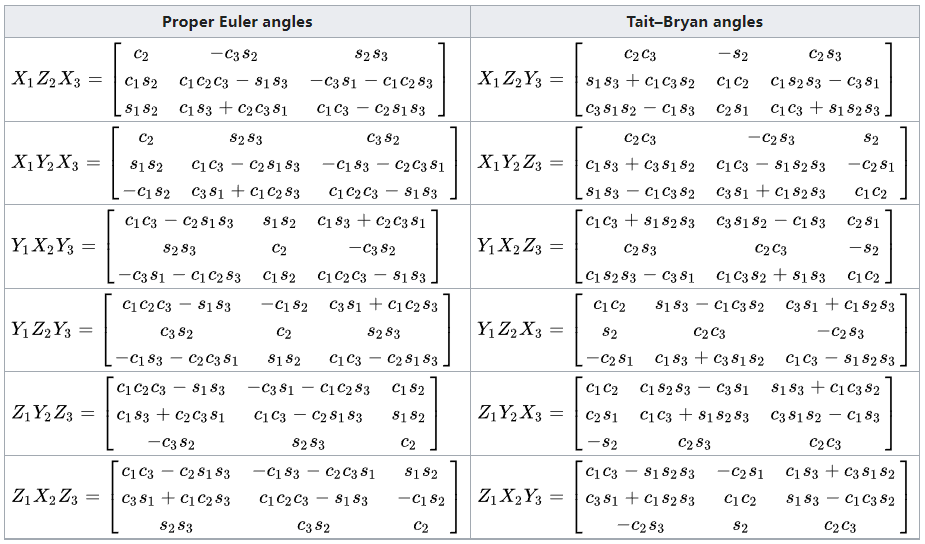
表示旋转的欧拉角旋转顺序有 12 种:
Proper/classic Euler angle:z-x-z,x-y-x,y-z-y,z-y-z, x-z-x,y-x-y
Tait-Bryan angle(也称作 RPY 角):x-y-z,y-z-x,z-x-y,x-z-y,z-y-x,y-x-z
Proper/classic Euler angle 说明这些角度并不是独立的,例如当下面的旋转组合:先绕 x 轴旋转 90 度,再绕 y 轴旋转 90 度,最后绕 x 轴旋转-90 度,这一系列组合得到的效果与只绕 z 轴旋转-90 度是一样的。也就是说我们仅仅在 2 个平面上进行旋转(其中一个平面上必须进行两次旋转)同样可以得到任意的三维旋转!
b.欧拉角内旋和外旋
内旋指绕着动坐标系主轴旋转,外旋指绕着静坐标系主轴旋转,内旋右乘,外旋左乘。欧拉角的表述用于确定姿态变换的过程,不同的变换过程确定不同的绕轴旋转顺序以及角度。下列表给出欧拉角的旋转顺序及角度计算
2.四元数
一般情况下,两个复数相乘
- 解决万向节死锁(Gimbal Lock)问题
- 仅需存储 4 个浮点数,相比矩阵更加轻量
- 四元数无论是求逆、串联等操作,相比矩阵更加高效

a.四元数组成
四元数从表达意义上理解和轴角相差无几,也是使用一个 4
个量表示绕此转轴的旋转角度。四元数由 1 个实数和 3 个虚数组成,其表达为
四元数中的每个数都是经过“处理”的轴和角,轴角描述的四个量并不是一个空间下的东西,首先
b.四元数使用
四元数的共轭:
四元数的模长:
四元数的逆:
单位四元数:
以
3.旋转向量
旋转向量也被称为轴角,其表达
优点 1:同轴的两次旋转可以直接相加来等效为一次旋转;
优点 2:定义简单,相对直观;
缺点 1:轴角法表示不唯一,当旋转角度是 0 的时候,旋转轴可以是任意的;
缺点 2:两次任意的连续旋转无法合成;
(5)欧拉角、旋转矩阵、四元数、旋转向量之间的转换关系(右手系最常用,教材、OpenCV 以及 Eigen 中都是用右手系,本文也以右手系为准)
先导知识
有一些几何变换的推导文章,公式都是正确的,但是很多时候可能会很迷惑,因为他们的公式中的符号可能是相反的。在我们初识三维坐标系时,大都是右手坐标系,但是有些理论是以左手笛卡尔坐标系为基础,所以时常需要进行左手系与右手系的相互转换。
不管是左手系转右手系还是右手系转左手系,我们都需要这样一个转换矩阵:(此转换矩阵需根据两坐标系之间的轴对应关系确定,在此因两坐标系仅 Z 轴相反,所以转换矩阵如下)
a.左手系转右手系
对于向量
对于旋转矩阵
b.右手系转左手系
对于向量
对于旋转矩阵
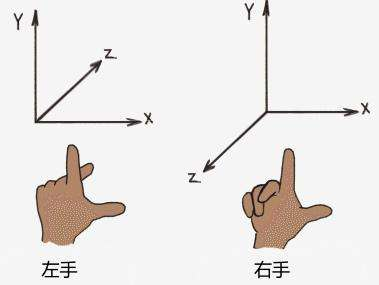
左手系用左手确定正方向,右手系用右手确定正方向。
1.欧拉角 ↔︎ 旋转矩阵
a.欧拉角 → 旋转矩阵
以右手系下的单轴旋转矩阵获得
b.旋转矩阵 → 欧拉角
利用欧拉角转旋转矩阵求反解:
观察旋转矩阵各元素特点求解
2.四元数 ↔︎ 旋转矩阵
a.四元数 → 旋转矩阵
对于三维坐标的旋转,可以通过四元数乘法直接操作,与旋转矩阵操作可以等价,但是表示方式更加紧凑,计算量也可以小一些。
若已知四元数
利用Rodrigues
公式(公式为右手系公式),将右手系罗德里格公式中的元素按
其中
b.旋转矩阵 → 四元数
由上式
那么应该选以上 4 种的哪一种呢?有学者建议首先判断
3.旋转向量(轴角)↔︎ 旋转矩阵
a.旋转向量(轴角)→ 旋转矩阵
假设有旋转向量(轴角)
b.旋转矩阵 → 旋转向量(轴角)
根据上述旋转矩阵元素排列特点,可得出下述计算式:
根据矩阵各元素对应相等,可求解
4.欧拉角 ↔︎ 四元数
a.欧拉角 → 四元数
欧拉角构造四元数,跟欧拉角构造旋转矩阵一样,就是把三个基础旋转组合在一起,将
b.四元数 → 欧拉角
根据上述欧拉角转四元数公式
由于
四元数转欧拉角计算过程中可能会出现旋转自由度丢失的情况,例如俯仰角为
90 度时,会出现
本博客所有文章除特别声明外,均采用 CC BY-SA 4.0 协议 ,转载请注明出处!
