工业相机参数介绍及原理讲解
本文最后更新于:2023年9月14日 上午
工业相机参数介绍及原理讲解
工业相机是一种特殊类型的相机,适合在恶劣的条件下工作(高温、高压和振动)。它们用于控制生产周期、跟踪生产线上的目标单位、检测超小零件等。因此,一般来说,它们的应用范围很广。
工业用相机因其高可靠性而与普通日常相机有很大不同。这种设备通常有坚固的外壳,保护内部机制免受湿度、灰尘、有害气体和其他环境因素的影响。工业相机的制造商使用最耐用的材料进行生产(金属,有时是增强塑料),并且由于它的加固设计,通常还能抵抗机械冲击和振动。具有高保护水平的相机能在-40至+70°C甚至更宽的温度范围内工作,有时工业摄像机也直接用于温度检查。
工业相机广泛应用于工业自动化和机器人领域。用于控制系统的相机通常需要高分辨率。它必须将图像数据快速传输到控制系统。工业生产应用需要机器视觉,机器视觉是计算机视觉在制造业中的应用,它允许控制系统看到现实中正在发生的事情的真实画面,而工业相机正充当这样的传感器角色。
参考
WhatareIndustrialcameras?Maintypesandimageprocessing
工业相机基础知识详述——焦平面,像平面,弥散圆,光圈,分辨率,景深,接口,靶面尺寸-立业安邦-博客园(cnblogs.com)
工业相机成像过程及相关参数_工业相机的工作过程-CSDN博客
凸透镜成像和小孔成像的原理分别是什么?有哪些区别和联系?-知乎(zhihu.com)
为什么有的人说照相机是小孔成像,有的人说是凸透镜成像??-懂得(idongde.com)
工业相机和工业镜头的选型实例-上海陆华光电科技有限公司(gvtec.com.cn)
深眸分享--工业相机镜头的选型-深眸科技(sensemoment.com)
ChoosinganAppropriateCameraLens-anoverview(sukhamburg.com)
一、工业相机类型
工业相机在机器视觉、工业制造、图像处理等方面应用广泛,是其中的重要组件。在工业视觉检测系统搭建中,工业相机的选型是关键的一环。任何东西都有一定的标准进行分类,工业相机是工业视觉检测系统中的核心组件,按照不同的分类标准,可以分为多个类型。
(1)靶面类型
按照靶面类型不同,可以分为面阵相机和线阵相机:面阵相机是指可以一次性采集获取图像的工业相机,在形状、尺寸、位置等检测应用中广泛应用。线阵相机是指采用线阵图像传感器的工业相机,可以用于金属、塑料、纤维等印刷缺陷检测。
ShouldYouGoforanAreaScanoraLineScanCamera?(voltrium.com.sg)
(2)芯片类型
按照芯片类型不同可以分为CCD相机和CMOS相机:CCD工业相机具有体积小重量轻、低功耗、响应速度快、像素集成度高等优势,CMOS工业相机具有高速成像、高帧率、高性价比等优势。
KeydifferencesbetweenCCDandCMOSimagingsensors|TeledyneFLIR
(3)图像颜色
按照输出图像颜色不同可以分为黑白相机和彩色相机:相同分辨率下,黑白工业相机相比彩色工业相机精度更高,检测图像边缘时,黑白工业相机成像效果更好。如果需要处理项目与图像颜色有关,彩色工业相机效果更佳。
工业相机按照分类标准不同,还有多种类型。工业相机的选型是机器视觉项目搭建时的重要环节,除了需要了解工业相机的类型及功能,相机价格和厂家售后等需要同时考虑,才能选择出更合适的工业相机。
二、工业相机参数
工业相机的应用范围很广,可以应用于工业自动化、机器人、交通控制、医药、生物科学、工业生产、安防等领域。选择合适的工业相机以满足工作需求,就需要了解工业相机参数以及其数值会影响相机的哪方面性能。
(1)分辨率
相机的传感器sensor是有许多像元按照矩阵的形式排列而成,分辨率就是以水平方向和垂直方向的像元个数来表示的。分辨率越高,成像后的图像像素数就越高,图像就越清晰。常用的工业面阵相机分辨率有130万、200万、500万等;对于线阵相机而言,分辨率就是传感器水平方向上的像素数,常见有1K、2K、6K等。
在相机分辨率的选型上,要根据工作需求而定,并不一定是分辨率越高就越好,分辨率高带来的图像数据量就大,后期的算法处理复杂度就高,而且一般分辨率大的相机,帧率一般都不会太高。
(2)帧率[面阵相机]/行频[线阵相机]
最大帧率表示的是面阵工业相机每秒能够采集并输出的最大帧数,这往往和传感器芯片和数据输出接口带宽有关。根据项目需求,对于拍摄运动物体,建议选取高帧率相机,具体帧率数要根据拍摄精度来确定。
帧率是相对于面阵工业相机来说的,单位是fps,如181fps,即相机每秒内最多可采集181帧图像。
行频是相对于线阵工业相机来说的,单位是kHz,如80kHz,即相机每秒内最多可采集80000行图像数据
(3)像元尺寸
像元尺寸和像元数(分辨率)共同决定了相机靶面的大小,通常工业相机像元尺寸为2μm~14μm。
像元尺寸从某种程度上反映了芯片的对光的响应能力,一般情况下,像元尺寸越大,能够接收到的光子数量越多,在同样的光照条件和曝光时间内产生的电荷数量越多。
(4)像素深度(位深)
像素深度是指每位像素数据的位数,通常用多少比特位表示。一般,每个像素的比特位数多,表达图像细节的能力强,这个像素的灰阶值更加丰富、分得更细,像素的灰阶深度就更深,但同时数据量也越大,影响系统的图像处理速度,因此也需慎重选择。
常见的是8bit、10bit、12bit。分辨率和像素深度共同决定了图像的大小。例如对于像素深度为8bit的500万像素,则整张图片应该有2560×2048×8/8/1024/1024=5MB。
(5)曝光时间
曝光时间是为了将光投射到照相感光材料的感光面上,快门所要打开的时间;视感光材料的感光度和对感光面上的照度而定;曝光时间长,进光量就越大,适合光线条件较差的情况;曝光时间短则适合光线比较好的情况。曝光时间调整会影响帧率。
(6)焦距
焦距就是从镜头的中心点到焦平面上所形成的清晰影像之间的距离,注意区分相机的焦距与单片凸透镜的焦距是两个概念,因为相机上安装的镜头是多片薄的凸透镜组成,单片凸透镜的焦距是平行光线汇聚到一点,这点到凸透镜中心的距离。焦距的大小决定着视角大小,焦距数值小,视角大,所观察的范围也大;焦距数值大,视角小,观察范围小。
(7)传感器尺寸(靶面尺寸)
工业相机参数列表中一般将传感器尺寸参数描述为靶面尺寸:1/n",这里指的是传感器(工作区域为矩形)对角线长度为1/n英寸,但这里英寸和mm的换算关系并不是1英寸=25.4mm,而是=16mm。下面列举了一些常用的靶面尺寸:
| 靶面尺寸(1/n") | 宽(mm) | 高(mm) | 对角线(mm) |
|---|---|---|---|
| 1.1英寸 | 12 | 12 | 17 |
| 1英寸 | 12.7 | 9.6 | 16 |
| 2/3英寸 | 8.8 | 6.6 | 11 |
| 1/1.8英寸 | 7.2 | 5.4 | 9 |
| 1/2英寸 | 6.4 | 4.8 | 8 |
| 1/3英寸 | 4.8 | 3.6 | 6 |
| 1/4英寸 | 3.2 | 2.4 | 4 |
(8)光学放大倍数(光学倍率)
光学放大倍率=传感器尺寸(V)/视场尺寸(V)
(9)单像素精度
单像素精度=视野长度/传感器长度方向有效像素个数
(10)接口类型
工业相机通常有三个基础的接口:电源接口、数据接口与镜头接口。
1.电源接口
相机电源输入接口。
2.数据接口
按照接口标准不同,工业相机常用的数据接口有GigE、CameraLink、USB3.0、CoaXPress等类型。
3.镜头接口
工业相机镜头接口种类很多,常用的一般有C接口、CS接口、F接口、M42接口、M72接口等。
三、工业相机及工业镜头的选型过程
方法/步骤1:
首先,要确定工业相机的接口、靶面尺寸和分辨率大小。打比方是2/3"工业相机,C接口,5百万像素;那么我们可以先确定需要的工业镜头是C接口,最少支持2/3",5百万像素以上。
方法/步骤2:
其次,确定所要达到的视野范围
方法/步骤3:
打比方说,视野
四、工业相机成像原理
相机图像拍摄的过程实际上是一个光学成像的过程。相机的成像过程涉及到四个坐标系:世界坐标系、相机坐标系、图像坐标系、像素坐标系以及这四个坐标系的转换。相机透镜成像基本原理如下图所示:
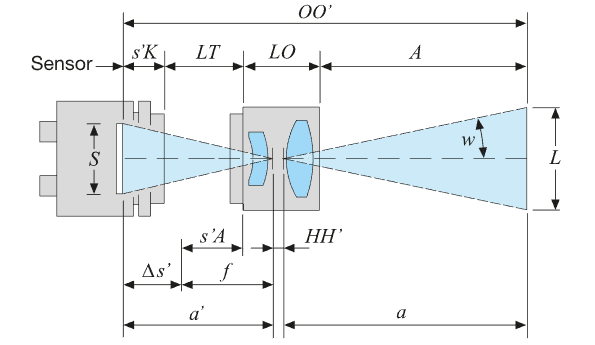
(1)简化相机成像模型
相机的镜头是一组透镜,当平行于主光轴的光线穿过透镜时,会聚到一点上,这个点叫做焦点,焦点到透镜中心的距离叫做焦距
基于上图,当相距
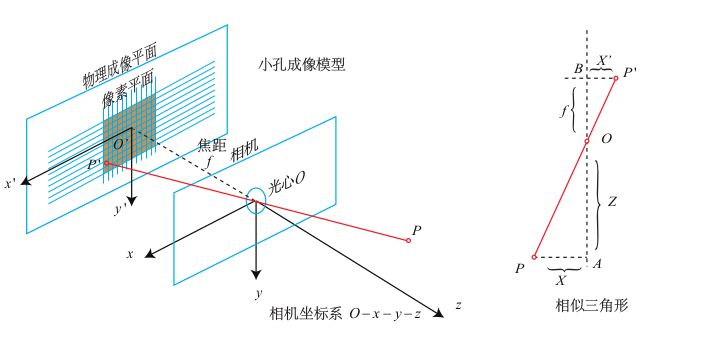
对于针孔相机模型,如下图所示(其中
世界坐标系:是客观三维世界的绝对坐标系,也称客观坐标系。
相机坐标系:以相机的光心为坐标原点,
图像坐标系:以图像平面的中心为坐标原点,
像素坐标系:以图像平面的左上角顶点为原点,
(2)单点无畸变相机成像模型
1. 世界坐标系->相机坐标系
从世界坐标系到相机坐标系,涉及到旋转和平移(其实所有的运动也可以用旋转矩阵和平移向量来描述)。绕着不同的坐标轴旋转不同的角度,得到相应的旋转矩阵,如下图所示
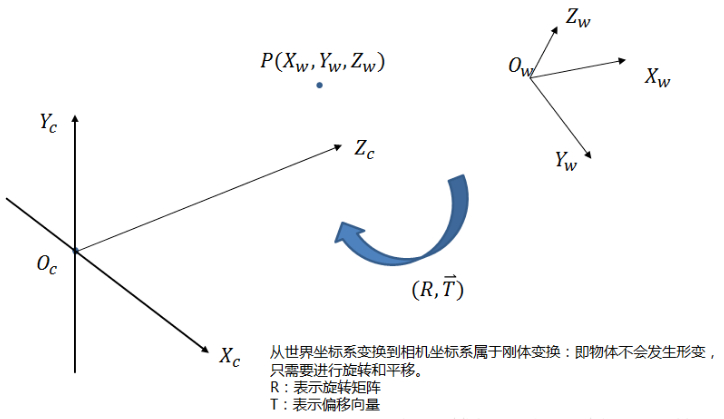
于是可以得到
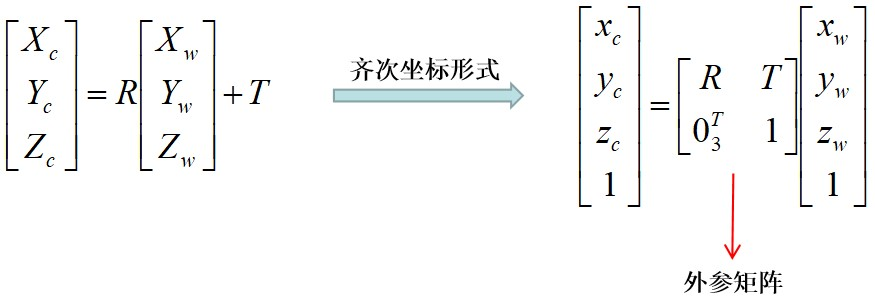
其中
2. 相机坐标系->图像坐标系
真实世界中的某点会投影在相机的成像平面上,利用针孔成像原理,空间任意一点
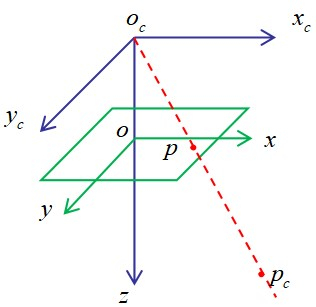
该过程为透视投影,利用相似三角形关系可得:
其中
写成矩阵形式,则投影关系为:
其中,
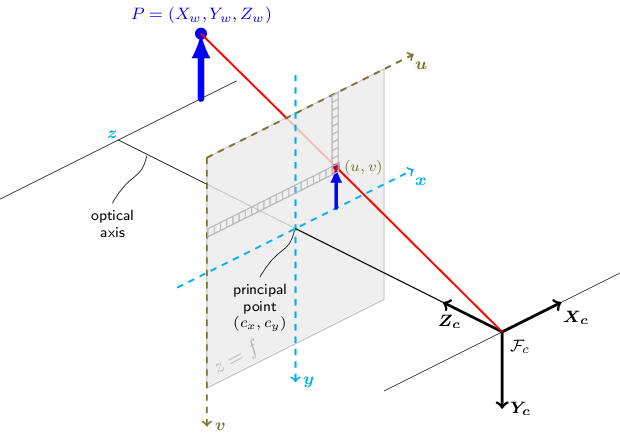
3. 图像坐标系->像素平面坐标系
像素坐标系和图像坐标系都在成像平面上,只是各自的原点和度量单位不一样。图像坐标系的原点为相机光轴与成像平面的交点,通常情况下是成像平面的中点或者叫principal
point。图像坐标系的单位是
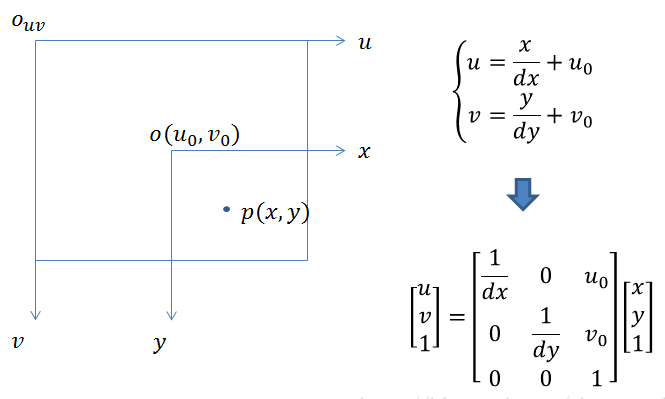
其中
4. 理想的世界坐标->像素坐标系整体转换:
由以下关系世界坐标系->相机坐标系、相机坐标系->图像坐标系、图像坐标系->像素平面坐标系可整理得:
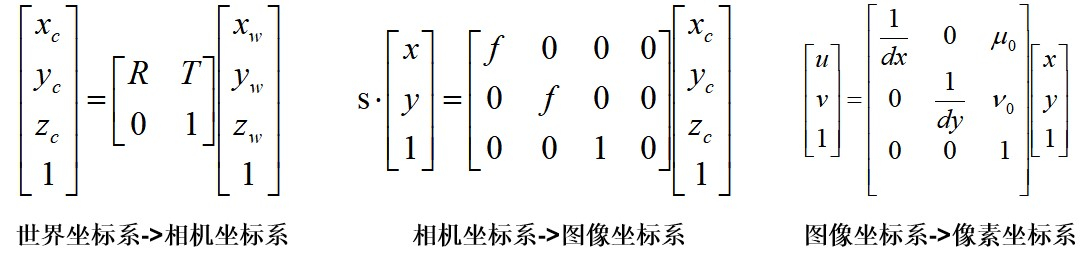
单点无畸变的相机成像模型如下:
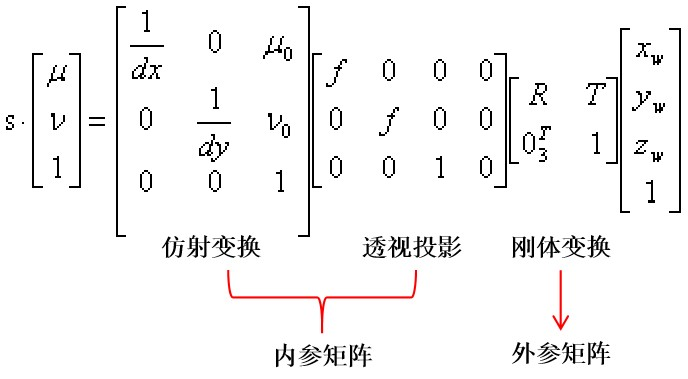
其中,
(3)镜头畸变修正模型
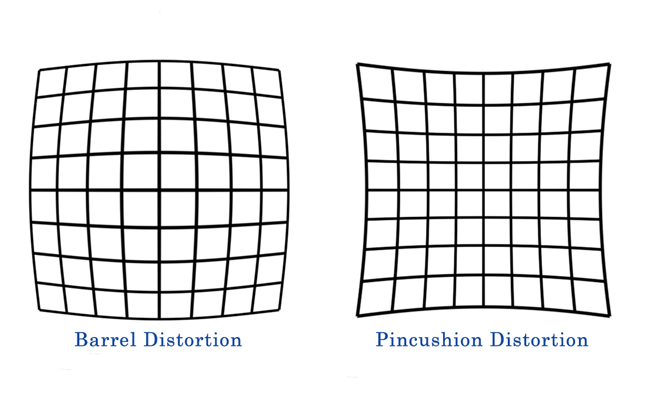
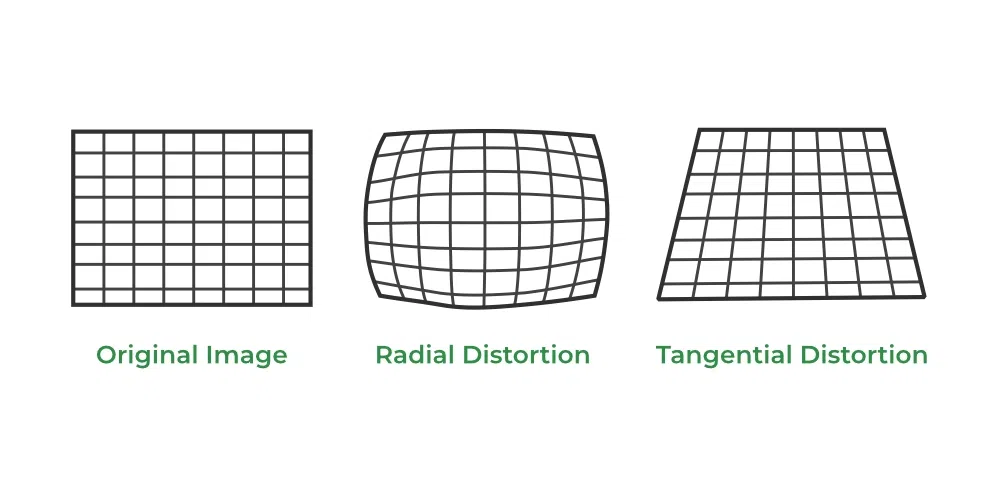
真实透镜通常有一定的畸变,主要是径向畸变和轻微的切向畸变,因此,需将上述模型进行扩展。
将相机模型整理得:
其中
其中
其中
径向畸变示意图如下:
切向畸变示意图如下:
本博客所有文章除特别声明外,均采用 CC BY-SA 4.0 协议 ,转载请注明出处!
